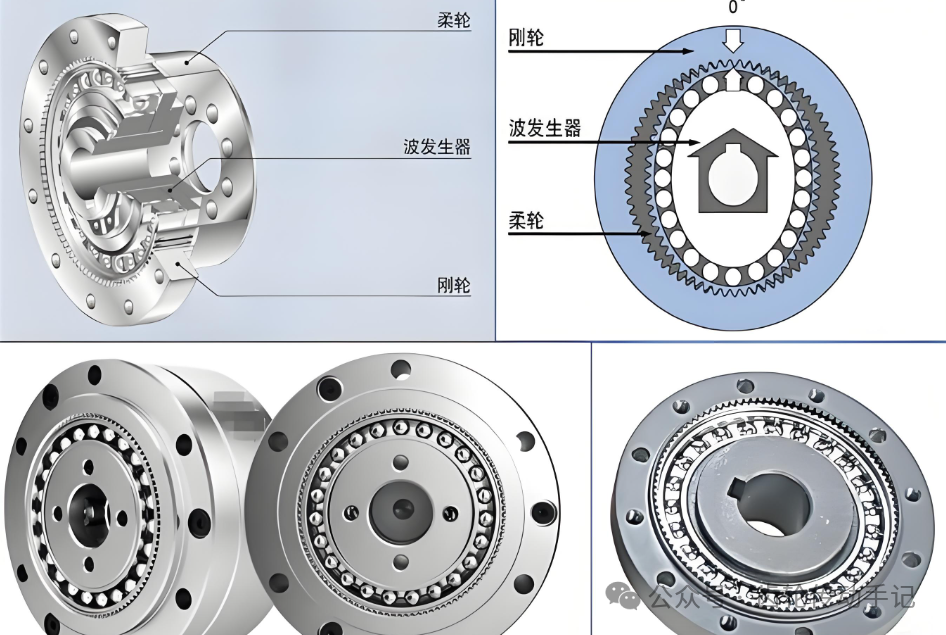
刚性内齿轮,齿数比柔轮多2个(如刚轮100齿,柔轮98齿),固定不动。
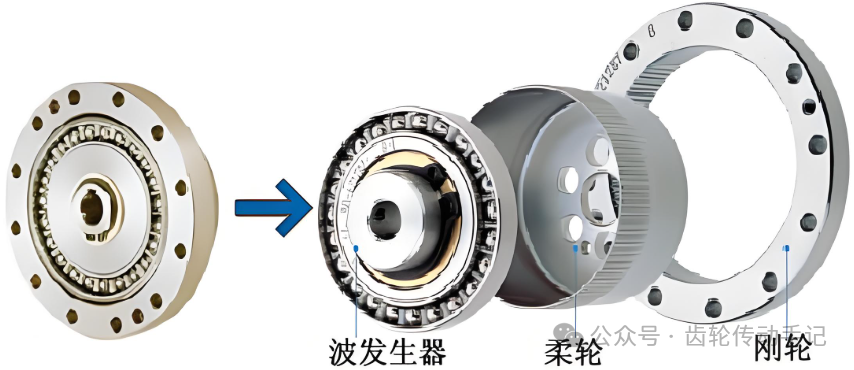
谐波减速机的传动基于弹性变形+齿间错位啮合原理:
波发生器旋转:
电机驱动波发生器(椭圆形凸轮)转动,迫使柔轮发生弹性变形,呈椭圆形。
柔轮与刚轮啮合 :
在椭圆长轴方向,柔轮外齿与刚轮内齿完全啮合;
在短轴方向,齿间脱开(无接触)。
运动传递 :
波发生器每转一圈,柔轮因齿数差(通常少2齿)会相对于刚轮反向移动2个齿距。
最终输出由柔轮固定端或刚轮固定端决定,实现减速(典型减速比30~320)。
谐波减速机的核心原理
弹性变形传动:柔轮的周期性变形实现无间隙啮合。
多齿同步啮合:约30%的齿同时啮合,承载能力高。
零背隙:弹性预紧消除回差,适合精密控制
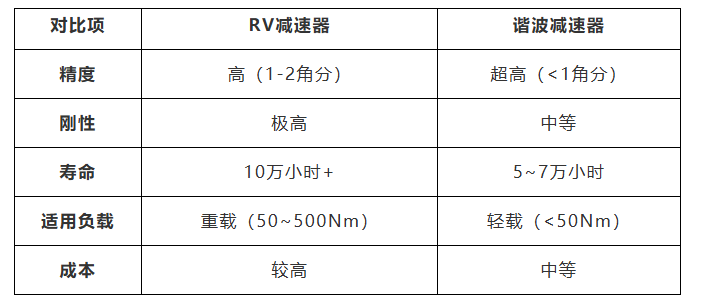
谐波减速机优点 :
超高精度 (<1角分),回差极小,适用于精密控制。
体积小、重量轻 ,适合紧凑型设计。
传动比大 (50~160),效率高(>90%)。
零背隙 ,适用于精密定位。
谐波减速机缺点 :
刚性较低 ,不适用于高负载场景。
寿命较短 (柔轮易疲劳,约5~7万小时)。
发热问题 :高速运行时易产生热量。
谐波减速机应用 :
协作机器人、SCARA机器人(轻负载关节)。
航空航天、光学设备、半导体制造。
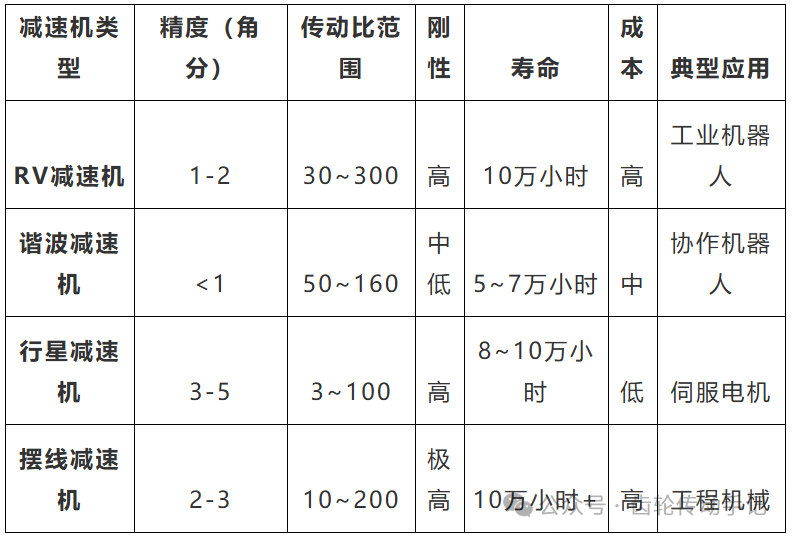
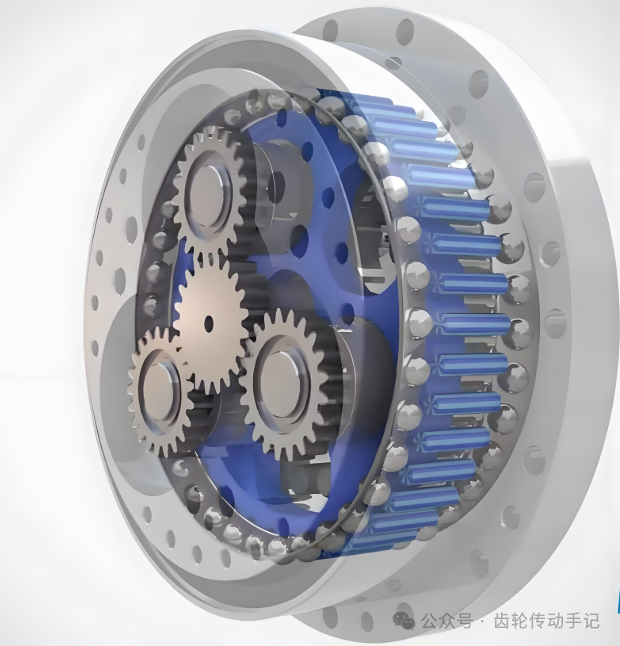
3.行星减速机(Planetary Gear Reducer)
原理 :采用行星齿轮系(太阳轮、行星轮、外齿圈)实现多级减速,传动比通常3~100。
(图片来源网络)
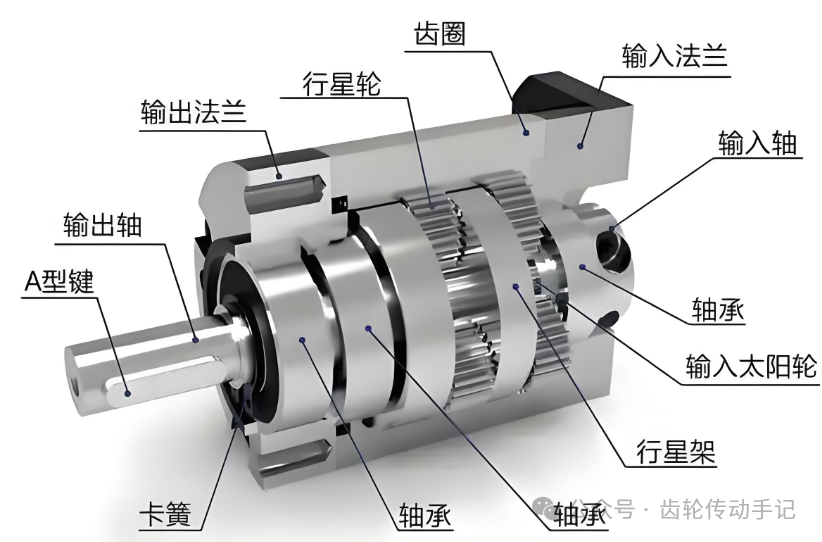
行星减速机主要由以下部件构成:
太阳轮(Sun Gear)(输入部分)
由电机直接驱动,位于减速机中心。
行星轮(Planet Gears)
通常3~5个,均匀分布在太阳轮周围,与太阳轮和外齿圈同时啮合。
行星架(Planet Carrier)(输出部分)
固定行星轮并输出动力,通常作为减速后的旋转轴。
齿圈(Ring Gear)
固定在减速机外壳内,与行星轮啮合,通常不旋转(部分设计允许旋转以改变传动比)。
行星减速机的传动基于多轮啮合分载原理:
动力输入:电机驱动太阳轮顺时针旋转。
行星轮运动:太阳轮带动行星轮自转(逆时针方向)。由于外齿圈固定,行星轮在自转的同时沿外齿圈“公转”(顺时针方向)。
动力输出:行星架跟随行星轮公转,输出减速后的旋转运动。
行星减速机优点 :
高扭矩密度 ,承载能力强。
效率高 (>95%),散热性好。
结构紧凑 ,适合空间受限场景。
成本较低 ,市场成熟。
行星减速机缺点 :
精度较低 (3~5角分),回差较大。
高减速比时结构复杂 ,可能影响寿命。
行星减速机应用 :
伺服电机配套、自动化生产线。
汽车传动、工程机械、包装设备。
4.摆线减速机(Cycloidal Reducer)
原理 :利用摆线针轮啮合传动,具有多齿接触特性。
(图片来源网络)
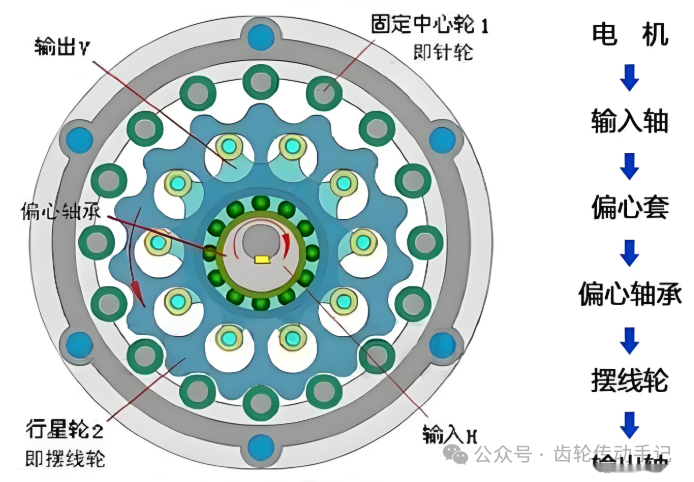
摆线减速机主要由以下部件构成:
输入偏心轴(Eccentric Input Shaft):由电机驱动,带动摆线盘做偏心旋转运动。
摆线盘(Cycloidal Disc):边缘带有特殊摆线齿形的圆盘,其齿廓曲线为摆线(Cycloid)或次摆线(Hypocycloid) 。
针轮(Pin Gear):固定在壳体上的环形排列针齿(通常为圆柱销),与摆线盘啮合。
输出机构(Output Mechanism):通过偏心轴承或销轴将摆线盘的摆动转换为匀速旋转输出
摆线减速机的传动基于摆线运动+针轮约束 原理:
动力输入 :电机驱动偏心轴旋转,带动摆线盘做偏心运动(公转)。摆线啮合 :摆线盘的齿与针轮的针齿啮合,由于偏心运动,摆线盘会产生自转。每转一圈,摆线盘的自转角度为360°/(Np-Nd),其中
Np为针齿数,Nd为摆线盘齿数。
动力输出 :摆线盘的自转通过输出销或轴承传递到输出轴,实现减速。
摆线减速机优点 :
超高扭矩 ,适用于重载应用。
寿命长 (可达10万小时以上)。
抗冲击能力强 ,适用于恶劣环境。
摆线减速机缺点 :
制造工艺复杂 ,成本高。
精度略低于RV减速机 (2~3角分)。
振动噪声较大 (相比谐波减速机)。
摆线减速机应用 :
起重机、挖掘机等工程机械。
高负载工业机器人关节。
更高精度与刚性 :随着工业机器人精度要求提高,RV减速机和谐波减速机的改进方向包括新材料(如碳纤维增强柔轮)、优化齿形设计以减少回差。
轻量化与紧凑化 :谐波减速机继续向小型化发展,适应协作机器人需求;RV减速机通过结构优化减轻重量。
智能化与集成化 :减速机与电机、编码器一体化设计,提升控制精度和响应速度。
长寿命与低维护 :采用耐磨涂层、自润滑技术减少磨损,提高可靠性。
国产化替代:中国企业在RV减速机、谐波减速机领域加速突破,降低进口依赖。
1. RV减速器发展趋势
(图片来源网络)
- 采用高强度铝合金或复合材料壳体,减少重量(如纳博特斯克最新型号减重15%)。
- 与电机、编码器一体化设计(如“RV+伺服电机”模块),简化安装并提升响应速度。
- 采用 修正摆线齿形 或 双圆弧齿形 ,降低传动误差和噪音(日本住友已实现噪音<60dB)。
- 中国厂商(如南通振康、双环传动)突破高精度摆线磨齿工艺 ,未来5年国产化率或超50%。
2.谐波减速器发展趋势 :
模块化与微型化 :
成本下探 :
3.行星减速器发展趋势 :

高速与大扭矩结合 :
智能化润滑 :
4.摆线减速机发展趋势 :

齿形优化 :
混合驱动技术 :
低成本制造 :
高精度、轻负载 场景适合谐波减速机;
重载、高刚性 需求选择RV减速机或摆线减速机;
通用工业应用 优先考虑行星减速机(性价比高)。
未来,随着机器人、智能制造、航空航天等领域的发展,减速机技术将继续向高精度、高可靠性、智能化方向发展,国产减速机品牌有望在全球市场占据更大份额。