



-
2026-05-22
-
2026-05-21
-
2026-05-20
-
2026-05-19
-
2026-05-18
-
2026-05-17
-
2026-05-16
-
2026-05-13
-
2026-05-12
-
2026-05-08
随着汽车保有量的增加,城市交通拥堵问题日益严重。在此背景下,开发一 种能够实现原地掉头的汽车具有重要意义。车辆若具备原地掉头功能,驾驶员在狭窄或受限空间内无需反复调整方向盘,即可轻松完成掉头操作,从而显著提升驾驶便捷性和效率,节省时间和精力。本文提出一种基于行星齿轮轴集成电机与离合器的差速器结构创新方案,并通过理论分析及计算确定电机关键参数。该设计结合智能控制策略及智能转向技术,有望实现车辆原地掉头功能。

引 言
车辆原地掉头是指车辆以其质心为圆心,在XY平面上转动180°完成掉头。目前,市场上典型的原地掉头技术如“易四方”采用分布式驱动结构,为每个车轮独立配备驱动电机,通过精确控制给左右两侧车轮施加相反的驱动力,左右两侧车轮反向转动,同时使车辆产生绕质心的转动,进而实现车辆原地掉头,如图1所示。然而,这种方案成本较高且主要适用于电动车。本文基于差速器的结构创新方案,旨在通过差速器结构改进,实现车辆左右车轮等速反向转动,从而实现车辆原地掉头。与分布式驱动结构相比,本设计方案成本更低且兼容电动车、燃油车、氢能源等多种车型,具有更广的适用性。

图1 易四方四电机图例控制原理图

差速器结构及工作原理
传统差速器由差速器壳体(图中差壳)、半轴齿轮、行星齿轮、齿圈等组成(如图2所示)。 差速器壳体与齿圈通过螺栓连接在一起。行星齿轮和半轴齿轮装在差速器壳体内部,行星齿轮和半轴齿轮相互啮合,成对使用。工作中动力经减速器齿轮传递到齿圈及差速器壳体,差速器壳体带动行星齿轮轴一起旋转,同时带动半轴齿轮转动,从而推动驱动轮前进。
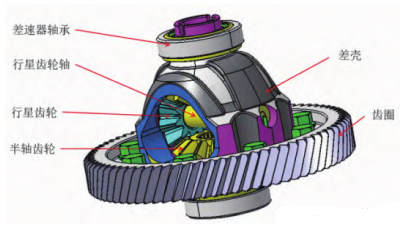
图2 传统差速器结构
差速器的核心功能是允许左右车轮以不同速度转动,以满足车辆转弯或在不平路面行驶的需求。
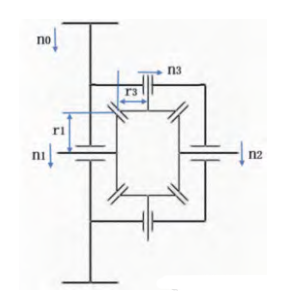
图3 传统差速器结构示意图
差速器工作中左、右半轴齿轮速差调整是自动的,当车辆在平坦的路面上直线行驶时,左右两个车轮受到的阻力相同,差速器处于平衡状态,行星齿轮无自转运动,差速器内部各组成零件之间无相对运动,整个差速器是一个整体,动力被平均传递到左右两车轮。此时差速器转速关系为:

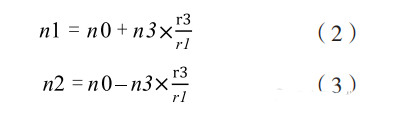
车辆转弯时,外侧车轮的转弯半径要大于内侧车轮的转弯半径,内外侧车轮受到的阻力也不同,这时差速器内部零件之间的平衡被破坏,行星齿轮在公转的同时绕行星齿轮轴自转来吸收内外侧车轮(左右车轮)传到左右半轴齿轮的速差,确保车辆顺利转弯。此情况下差速器的转速关系为:
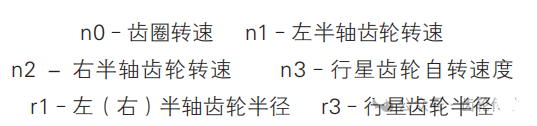
说明:n0、n1、n2、n3等所指参见图3。

可实现原地掉头的差速器设计
设计原理:
车辆原地掉头的关键在于前轴及后轴左右两侧车轮一侧正转一侧反转,方向相反且转速大小相等。车轮是通过左右传动半轴连接到差速器左右半轴齿轮的,差速器左右半轴齿轮实现速差取决于行星齿轮自转,故控制行星齿轮自转的速度是实现左右车轮反向转动及车辆原地掉头的关键。根据式(2)、(3)可知,为实现左右车轮等速反向转动,需满足n0=0且n3≠0。此时,左右半轴齿轮转速关系为:

n0=0容易实现,只需要齿圈静止即车辆原动力(发动机及驱动电机)不工作即可。n3≠0则需要行星齿轮有自转,即需要有驱动行星齿轮转动的动力机构。
结构改进:
基于上述原理,为使差速器转速关系满足式(4),本文的方案是给差速器行星齿轮轴配置电机及离合器。
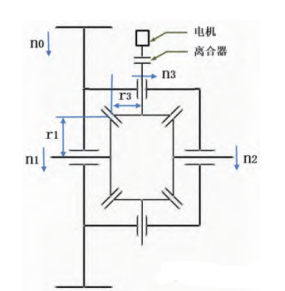
图4 差速器结构改进示意图
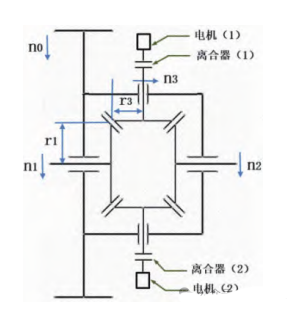
图5 差速器结构改进示意图
方案一:如图4所示,给差速器一侧行星齿轮轴配置电机及离合器,此方案结构简单,使用于质量较小的小型车辆。方案二:如图5所示,给差速器两侧行星齿轮轴均配置电机及离合器,提升扭矩输出冗余,此方案使用于质量较大的车辆。两个方案电机及离合器均由对应控制器进行控制,离合器可以实现电机和行星齿轮轴的结合和分离,电机输出通过控制器进行PID调节。车辆正常行驶时,离合器断开,电机不工作,差速器的运行与常规运行方式无异。 原地掉头时,根据整车指令,离合器结合,控制器控制行星齿轮轴电机启动工作以驱动行星齿轮自转,实现左右半轴齿轮以相同速度一个正转一个反转。
关键参数计算:
以某车辆为例,前轴及后轴差速器均按图4一侧行星齿轮轴配置电机及离合器的方案,计算行星齿轮轴电机功率及扭矩。计算需要用到的车辆参数如表1,其他涉及到的参数如表2。
表1 计算所需的车辆相关参数
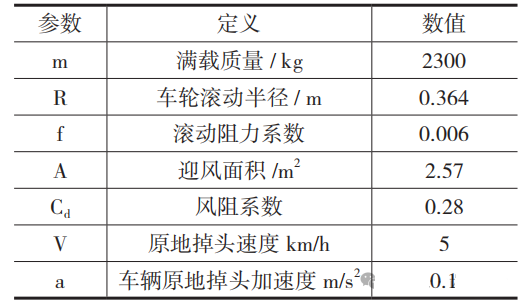
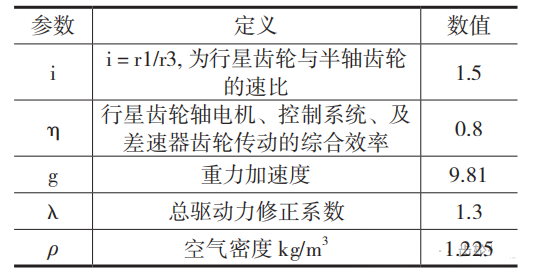
表2 其他参数
行星齿轮轴电机额定功率及额定扭矩:
车辆从静止起步原地掉头,匀加速到5km/h后维持此车速原地掉头。车辆以5km/h匀速原地掉头,行星齿轮轴电机需要提供的功率及扭矩计算步骤如下:
步骤1:阻力计算车辆以5km/h匀速原地掉头,需要克服的阻力主要包括滚动阻力Ff和空气阻力Fw(此处不考虑坡度阻力)
滚动阻力:Ff =f×m×g=0.006×2300×9.81=135.24N
空气阻力:

(式中,V需换算成m/s为单位)
步骤2:总驱动力计算车辆以5km/h匀速原地掉头的驱动力需要克服上述所有阻力,且原地掉头时车轮与地面可能有滑动存在,总驱动力需要在滚动阻力和空气阻力之和的基础上乘以修正系数λ,故总驱动力为:
Ft =λ(Ff+Fw)=1.3×(135.24+0.85)=177N
说明:修正系数λ根据车辆类型、车重、使用工况特性,选取λ=1.3。
步骤3:计算行星齿轮轴电机功率及扭矩5km/h匀速原地掉头,车辆运行需要的功率及扭矩由前轴及后轴行星齿轮轴电机共同提供(设前后轴均摊),各行星齿轮轴电机需输出的功率为:

式中,η为行星齿轮轴电机、控制系统、及差速器齿轮传动的综合效率。5km/h对应的车轮转速大小为:

行星齿轮轴电机转速为:n=nwheel×i=36.5×1.5=55r/min
行星齿轮轴电机需输出的扭矩:

说明:上述计算功率时速度V要转换成m/s为单位,计算转速时速度V要转换成m/min为单位,计算扭矩T时,功率P要转换成kW为单位。
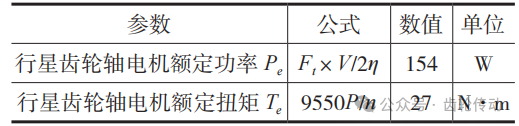
步骤4:行星齿轮轴电机额定扭矩与额定功率车辆以5km/h匀速原地掉头时的功率及扭矩均为车辆原地掉头长时工作输出需求,故差速器行星齿轮轴电机的额定功率及额定扭矩取值如表3。
表3 行星齿轮轴电机额定参数
行星齿轮轴电机峰值功率及峰值扭矩:
原地掉头车辆从静止起步,起步时驱动力需要能克服车轮与地面的静摩擦阻力及车辆旋转部件的惯性力。根据实测,此车辆从静止起步需要的最小驱动力矩为Tt=930N·m。若车辆起步的驱动力由前轴及后轴差速器行星齿轮轴电机提供,则行星齿轮轴电机需提供的输出扭矩为T=Tt/2ηi=387.5N·m。行星齿轮轴电机的体积必然很大,对空间布置非常不利。故车辆起步瞬间的驱动力考虑用车辆原本的动力源(发动机及驱动电机)来提供。车辆克服了静摩擦阻力开始滚动后,再将动力源切换为前轴及后轴差速器行星齿轮轴电机,由行星齿轮轴电机驱动车辆边加速边原地掉头,加速至5km/h后匀速原地掉头。
车辆起步后匀加速阶段,行星齿轮轴电机功率及扭矩计算步骤如下:
步骤1:阻力计算车辆起步后匀加速原地掉头,需要克服的阻力主要包括车轮滚动阻力Ff及加速阻力Fj(低速时空气阻力很小,此处忽略)。
加速阻力:Fj=m.a=2300×0.1=230N
滚动阻力:Ff= f×m×g=0.006×2300×9.81=135.24N
步骤2:总驱动力计算总驱动力:Ft=λ(Fj+Ff)= 1.3×(230+135.24)=475N
步骤3:计算行星齿轮轴电机功率与扭矩加速到5km/h瞬间,各行星齿轮轴电机输出功率:

各行星齿轮轴电机输出扭矩:

步骤4:行星齿轮轴电机峰值扭矩与峰值功率车辆以5km/h原地掉头,除了车辆起步需要较大的驱动力外,车辆在加速到5km/h瞬间需要的功率及扭矩是最大的,故行星齿轮轴电机的峰值功率及峰值扭矩应满足:Pmax≥412W,Tmax≥72N·m。
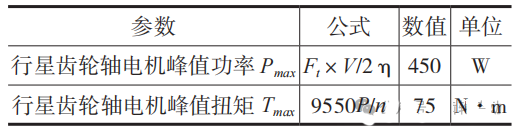
此处取行星齿轮轴电机的峰值功率为Pmax=450W,峰值扭矩Tmax=75N·m。综上,差速器行星齿轮轴电机峰值功率及峰值扭矩选取如表4。
表4 行星齿轮轴电机峰值参数

技术挑战与解决方案
根据前述分析及计算,车辆原地掉头还存在以下技术挑战:第一,电机选型。按表3及表4电机功率及扭矩参数,电机选型上存在一定的挑战。建议选择 合适的高扭矩密度的力矩电机,或调整优化(增大)差速器半轴齿轮和行星齿轮的速比i。此外,根据电机选型及装配空间需求,也可以采用图4的方案,给差速器两侧行星齿轮轴各配置一个电机(及离合器),如此单个电机的扭矩可以减半。第二,动力切换。原地掉头起步时由车辆原动力(发动机及驱动电机)提供扭矩克服车辆起步静摩擦阻力及惯性力矩,车轮滚动后切换至行星齿轮轴电机提供动力,动力切换如何平稳过渡是另一难题,需基于PID算法及智能化过渡控制策略来实现。最后,车辆原地掉头功能的实现还需要一套极其复杂、精密且高度可靠的软件控制策略,需要硬件、软件和控制系统高度协同。

结论与展望
本文提出的差速器结构为车辆原地掉头提供了一种硬件结构思路,适用于多种动力形式的车辆。本方案的落地还需通过多传感器融合控制系统进一步验证,未来可探索差速器与线控转向的协同优化,以提升可实施性。
参考文献:略。
作者简介:杜美荣毕业于武汉理工大学车辆工程专业,学士学位。现就职于岚图汽车科技股份有限公司,任混动模块工程师。









